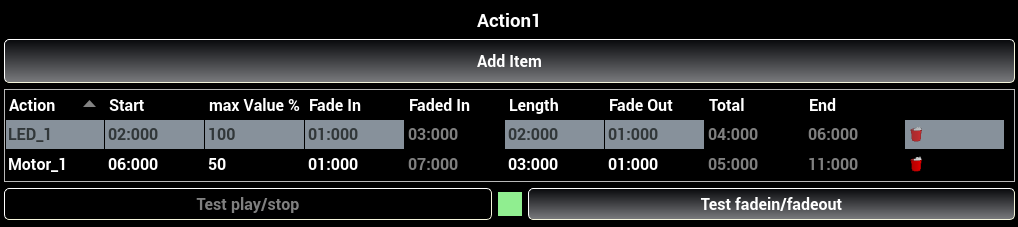
| Action |
Hier können Sie festlegen welcher Ausgang (Motor, LED, RC ..) mit dem Element gesteuert wird.
Wenn Sie auf eine 'Action' Zelle doppelt klicken, so können Sie
aus einer Liste der verfügbaren Ausgängen einen
auswählen.
'---' bedeutet, dass kein Ausgang angesprochen wird.
Hinweis: In der aktuellen Version der Software ist die Liste der Ausgänge nicht sortiert dargestellt. |
| Start |
Hier können Sie eine Startzeit /Verzögerung angeben, wann das Element startet,
Sie können einfach Millisekunden eingeben oder einen Text im Format hh:mm:ss:Millisekunden. |
| max Value % |
Wenn der Ausgang Werte akzeptiert (Motor, LED) können Sie hier den maximalen Wert in Prozent angeben.
Für Ausgänge wie RC oder Relais wird der Wert nicht berücksichtigt. |
| Fade In |
Wenn der Ausgang Werte akzeptiert (Motor, LED) können Sie hier die Zeit einstellen bis der maximale Wert erreicht wird.
Ausgänge wie RC oder Relais schalten sofort nach der Startzeit (es wird nicht eingefadet). |
| Faded in |
gibt die Zeit nach dem Einfaden an (Start + Fade In) |
| Length |
Hier können Sie die Zeit eingeben, wie lange das Element mit maximalem Wert läuft.. |
| Fade Out |
Wenn der Ausgang Werte akzeptiert (Motor, LED) können
Sie hier die Zeit einstellen bis von dem maximalen Wert die 0
(Nullstellung) erreicht ist.
Ausgänge wie RC oder Relais schalten nach der Fade Out Zeit ab (es wird nicht ausgefadet). |
| Total |
Gibt die Gesamtdauer des Elementes an. (Fade In + Length + Fade Out) |
| End |
Gibt an, wann das Element komplett abgespielt ist. (Start + Fade In + Length + Fade Out) |
 |
Ein Doppelklick auf den Papierkorb löscht die Zeile / das Element. |



 öffnet ein Hilfe-Fenster.
öffnet ein Hilfe-Fenster. werden die Änderungen gespeichert.
werden die Änderungen gespeichert.  werden die Änderungen verworfen.
werden die Änderungen verworfen.  können die Einstellungsdateien in einen anderen Ordner, z.B. auf einen USB Stick, exportiert werden.
können die Einstellungsdateien in einen anderen Ordner, z.B. auf einen USB Stick, exportiert werden. können die Einstellungsdateien aus einem (Export)-Ordner importiert werden.
können die Einstellungsdateien aus einem (Export)-Ordner importiert werden. 
 Input (Eingang)
Input (Eingang)

 können Sie die Einstellungen der einzelnen Eingänge testen.
können Sie die Einstellungen der einzelnen Eingänge testen. Servo-Motor-Ausgang
Servo-Motor-Ausgang
 eingegeben werden. Somit ist es möglich eine Beschränkung der maximalen Auslenkung festzulegen.
eingegeben werden. Somit ist es möglich eine Beschränkung der maximalen Auslenkung festzulegen. Relais-Ausgang
Relais-Ausgang
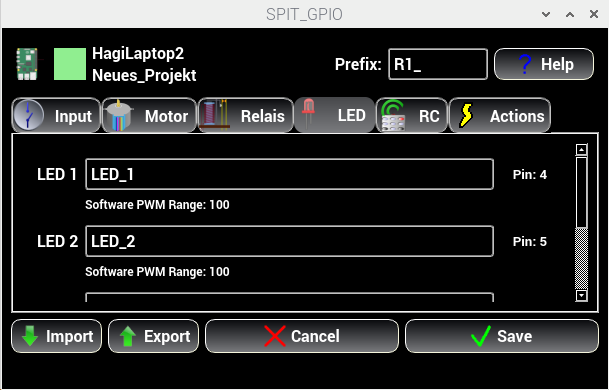
 LED-Ausgang
LED-Ausgang
 RC (Radio Control)
RC (Radio Control)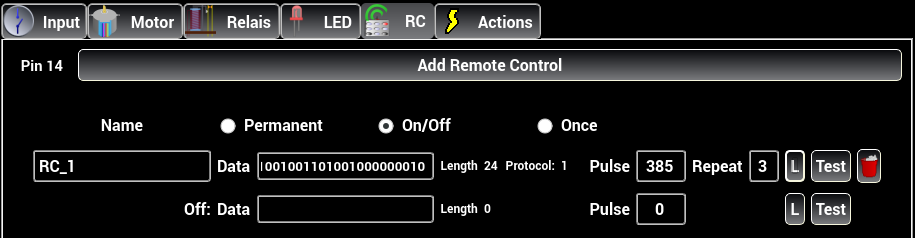
 kann ein neues RC Kommando erzeugt werden.
kann ein neues RC Kommando erzeugt werden.

 kann angegeben werden wie oft das Funkkommando
gesendet werden soll.
kann angegeben werden wie oft das Funkkommando
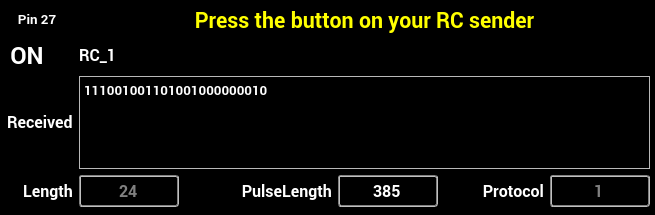
gesendet werden soll.  (für Lernen) gestartet werden - siehe weiter unten.
(für Lernen) gestartet werden - siehe weiter unten.  wird das jeweilige RC Kommando gelöscht.
wird das jeweilige RC Kommando gelöscht.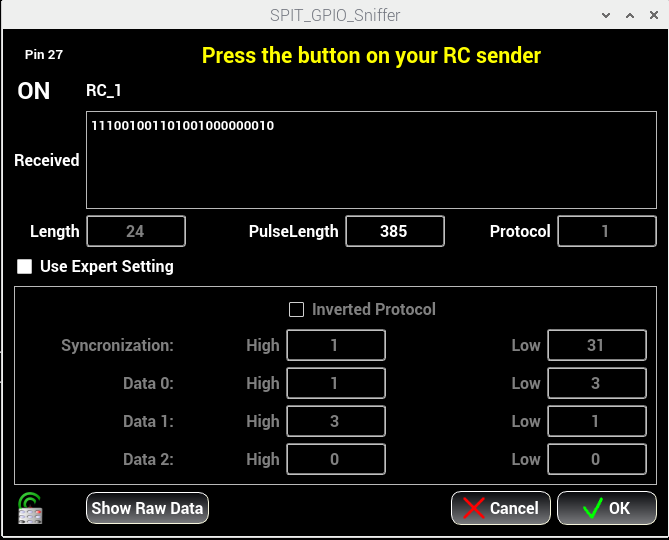


 in das Einstellungsfenster übernommen werden.
in das Einstellungsfenster übernommen werden.  werden die erkannten Werte verworfen, das Anlernfenster
wird geschlossen.
werden die erkannten Werte verworfen, das Anlernfenster
wird geschlossen.
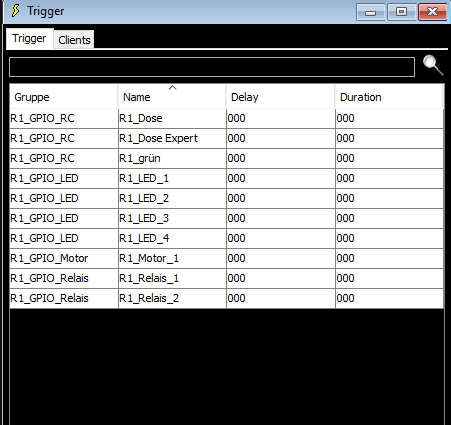
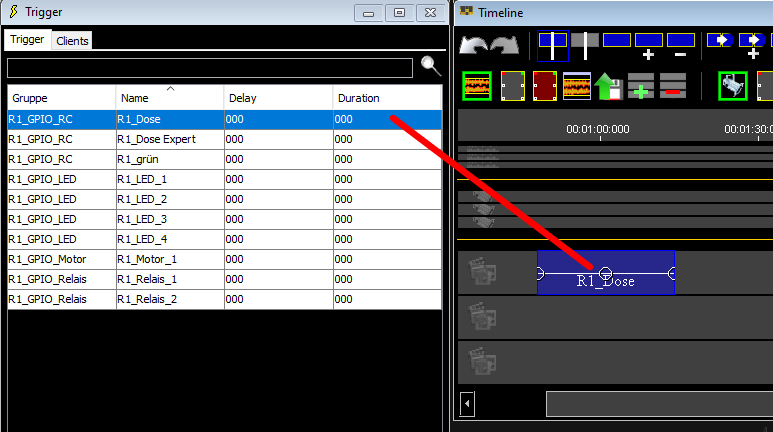
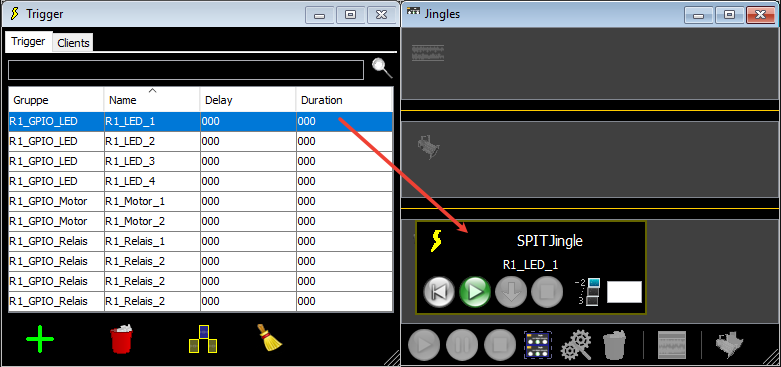
 Standalone Actions
Standalone Actions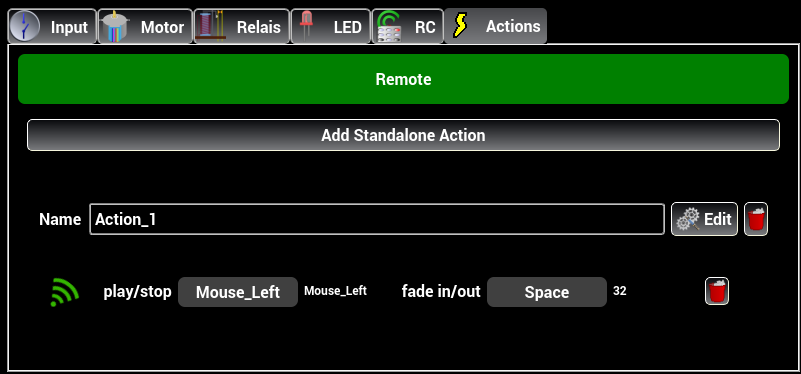
 wird eine neue eigenständige Aktion / Ablauf erzeugt.
wird eine neue eigenständige Aktion / Ablauf erzeugt. .
.
 wird der Aktion ein neues Element (eine neue Tabellenzeile) hinzugefügt.
wird der Aktion ein neues Element (eine neue Tabellenzeile) hinzugefügt. oder
oder  oder
oder 
 und
und  .
. wird der Abspielstatus angezeigt. Die Farbe ändert sich je nach Status:
wird der Abspielstatus angezeigt. Die Farbe ändert sich je nach Status: